

There a many field buses on the market that have been used to reduce this cost with Ethercat being one of them, however Ethercat stands alone due to its exceptionally high performance, and low distribution cost.
How will it reduce my costs?
Like all distributed I/O systems the idea is to have small groups of remote I/O signals network connected to the PLC central processor, this alleviates the need for expensive field cable runs and supporting cable trays. High power switching devices like Variable Speed Drives and DOL contactors are also located in the field with the remote I/O to also reduce installation costs. An added benefit of this approach will be a significant reduction of EMI noise emissions.
Why use Ethercat?
Ethercat has several significant advantages; the first being its high performance over standard Ethernet, whilst the second is its low distribution cost and therefore small I/O group size. Ethercat can readily achieve remote I/O updates in less than one millisecond, this means that the PLC task execution time determines the performance of the program not the field bus transaction time. Most field buses are typically 10 to 50 times slower than Ethercat. Small I/O modules down to 4 points with M8 plug connected field devices can also reduce the need for dedicated electrical wiring.
Safety over Ethercat to IEC61508 SIL3 enables the implementation of safety processes without the need for separate hardware.
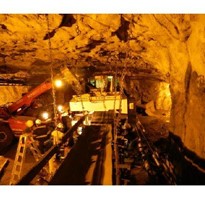
The picture below demonstrates the use of Ethercat based field enclosures (x4) for pump and boiler control in a CHP generation plant.
Why do I need the extra performance?
The simple task of sensing the start and end of small objects on a moving conveyor is a common task made impossible by slow field buses, even trying to accurately measure the size of larger objects will be problematic. An Ethercat system will have a sensing accuracy of 1mm on a conveyer moving at 1 m/sec.
PID loops for process control require updates many times faster than the time constant of the loop with a low level of jitter, both can be readily achieved with Ethercat.
Finally in summation you can think of Ethercat being like a Ferrari – if a Ferrari was cheaper than your SUV would you still be driving the SUV to work?










-205x205.jpg)








