
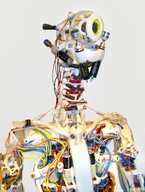
The artificial muscles of this still rather scary looking model are set in motion by precise DC drives from maxon motor.
Researchers on the EU Eccerobot project are working on a new type of humanoid robot that will eventually not just look like a human, but also move and act like one. The artificial muscles of this still rather scary looking model are set in motion by precise DC drives from maxon motor.
Humanoid robots have been the focus of public interest for years, provoking different types of emotion in us. Some people are fascinated by the progressive technical aspect, while others are wary of the soulless perfection of these machines.
There are many examples of such robots, such as Honda's Asimo, the Korean Institute of Technology's Einstein robot Albert HUBO, or the female robot HRP-4 C developed by Japan's National Institute of Advanced Industrial Sci-ence and Technology and Kawada. They all make an impression when they appear at exhibitions, run, swerve around people or shake hands with them. They are normally designed as industrial robots, in that their hands, arms and legs are stiff, metallic limbs that are turned and bent by electromotors, many of which are made by maxon motor.
However, two-legged robots today function incredibly well, although simulating the human gait is particularly challenging. The human body constantly resets its center of gravity in parallel with other changes in its support points and in line with many other factors. The more fluid a robot's movements are supposed to be, the more precise the positions of the individual limbs have to be calculated and carried out. This involves an enormous amount of data and the smallest error can make a robot fall over.
The EU Eccerobot research project has adopted a completely new approach by building anthropomorphic robots with bones, muscles and tendons. In a recent interview, project leader Owen Holland stated that "We are looking to build a robot that not only looks like a human being, but also copies the inner structure and mechanisms of the hu-man movement apparatus."
Eccerobot is designed to react individually to various situations and respond to its envi-ronment, as it would need these characteristics to cope with day-to-day life as a robotic butler in the home or a nurse in a hospital. If this were the case, then Eccerobot could also have other potential uses.
A skeleton with bones, muscles, tendons - and DC mo-tors.
Eccerobot is a skeleton supporting muscle attach-ments. The bones are made of polycaprolacton (PCL), also known as polymorph. This softens at 60°C and can be molded as required. Polymorph then hardens when cooled which means that it can easily withstand tensile forces. But in doing so, it also retains a certain degree of elasticity.
There are 80 actuators housed in the entire robot, one for each muscle. They comprise a maxon motor with gearbox and encoder, a spindle, a piece of kite line and a rubber band. This sounds rather makeshift, but visually, it really does look like a person which is rather eerie. But how do the body movements actually work?
Figure: Movement principle of the Eccerobot's arm
Let's look at the Eccerobot's arm as an example. It comprises two polymorph bones to which the artificial muscles are attached. The kite line attaches the spin-dle on the gear-box to the rubber band which is fixed on the other side on the bone. To flex the muscle, the DC motor uses the gear-ing to turn the spindle on which the kiteline unfurls. By doing so, it slowly raises the lower arm using the elastic rubber band.
Helping understand humans
The Eccerobot project is largely about basic research, as robots help us understand how human intelligence works. Researchers have found that intelligence not only comes from the brain but is also distributed throughout the whole body.
"When we raise an arm, the rest of the body also changes posture completely," says Rolf Pfeifer, Director of the Artificial Intelligence Laboratory at the University of Zurich which is also working on the Eccerobot alongside other universities.
"The movements of the robot's body parts are there-fore related to each other. If the relevant sensomotor data are combined with those of the optical system, i.e. the camera, this produces correlations that can be recognized. This way the robot can gradually learn about its own dynamics and develop knowledge about its own body," continues Pfeifer.
Eccerobot will initially remain just a torso. At the mo-ment the control electronics are still housed in an external casing, but they will be distributed throughout the whole skeleton at a later date. Over the long term however, scientists would like to build a humanoid robot that can walk on two legs and interact with its environment, just like a human. The legs have already been designed.
maxon motor supports forward-looking projects in a variety of areas. It has formed a partnership with the Artificial Intelligence Laboratory (AI Lab) of the University of Zurich for developing ideas such as Eccerobot. The AI Lab is involved in numerous projects at international level which means that the latest scientific findings can also be directly incorporated into maxon motor's developments.
"We are impressed by maxon motor, but not just by the high quality of its products, the efficient and friendly customer service and the high competence of its staff. It is the unique culture of innovation and the readiness to come up with unconventional solutions that make maxon motor and AI Lab successful partners," said Pascal Kaufmann, Researcher and Head of Joint Ventures at AI Lab.
In future, all actuators for the Eccerobot and all hu-manoid robots at the AI Lab will be fitted with maxon motor's precision drives, gears and sensors.

-205x205.jpg)














